Linear Feasibility Pump for MINLPs. More...
#include <LinFeasPump.h>
Public Member Functions | |
| LinFeasPump (EnvPtr env, ProblemPtr p, EnginePtr e1, EnginePtr e2) | |
| Default constructor. | |
| ~LinFeasPump () | |
| Default destructor. | |
| void | solve (NodePtr node, RelaxationPtr rel, SolutionPoolPtr s_pool) |
| Call to the heuristic. | |
| void | writeStats (std::ostream &out) const |
| Write statistics to the logger. | |
 Public Member Functions inherited from Minotaur::FeasibilityPump Public Member Functions inherited from Minotaur::FeasibilityPump | |
| FeasibilityPump (EnvPtr env, ProblemPtr p, EnginePtr e) | |
| default constructor | |
| FeasibilityPump (EnvPtr env, ProblemPtr p, EnginePtr nlpe, EnginePtr e) | |
| constructor for derived class | |
| virtual | ~FeasibilityPump () |
| default destructor | |
| Public Member Functions inherited from Minotaur::Heuristic | |
| Heuristic () | |
| Default constructor. | |
| virtual | ~Heuristic () |
| Destroy. | |
| virtual void | solveNode (ConstSolutionPtr, NodePtr, RelaxationPtr, SolutionPoolPtr) |
| Use this heuristic. | |
Protected Member Functions | |
| void | constructObj_ (ProblemPtr prob, ConstSolutionPtr sol) |
| Function to construct/update the objective function. | |
| void | implementFP_ (const double *x, SolutionPoolPtr s_pool) |
| Fucntion to implement the linear feasibility pump. | |
| double | getSolGap_ (double f_nlp, double f_feas) |
| Calculate the gap between the NLP relaxation solution and integer feasible solution. | |
| bool | prepareLP_ (SolutionPool *sp) |
| A function to prepare the linear relaxation. | |
| void | separatingCut_ (double f_nlp, SolutionPoolPtr s_pool) |
| This function makes a cut by including the objective as constraint. | |
| bool | shouldFP_ () |
| Function to decide whether to use Linear Feasibility Pump. | |
| Protected Member Functions inherited from Minotaur::FeasibilityPump | |
| void | convertSol_ (SolutionPoolPtr s_pool, ConstSolutionPtr sol) |
| Function to convert a solution of the cloned problem to that of an original problem. | |
| bool | cycle_ (double find_value) |
| A search function for detection of cycling. | |
| double | hash_ () |
| A function to hash the solutions. | |
| bool | isFrac_ (const double *x) |
| Function to check the integrality of a variable. | |
| void | perturb_ (double hash_val, UInt n_to_flip) |
| A function to perturb the rounded solution in case of cycling. | |
| void | restoreBounds_ (double *LB_copy, double *UB_copy, UInt vars) |
| A function to restore the upper and lower bounds of the problem. | |
| void | saveBounds_ (double *LB_copy, double *UB_copy, UInt vars) |
| A function to save the upper and lower bounds of the problem. | |
| VarVector | selectToFlip_ (UInt n_to_flip) |
| A funtion to randomly select "n" binary/integer variable to be flipped. | |
Protected Attributes | |
| double * | gradientObj_ |
| gradient of the objective function | |
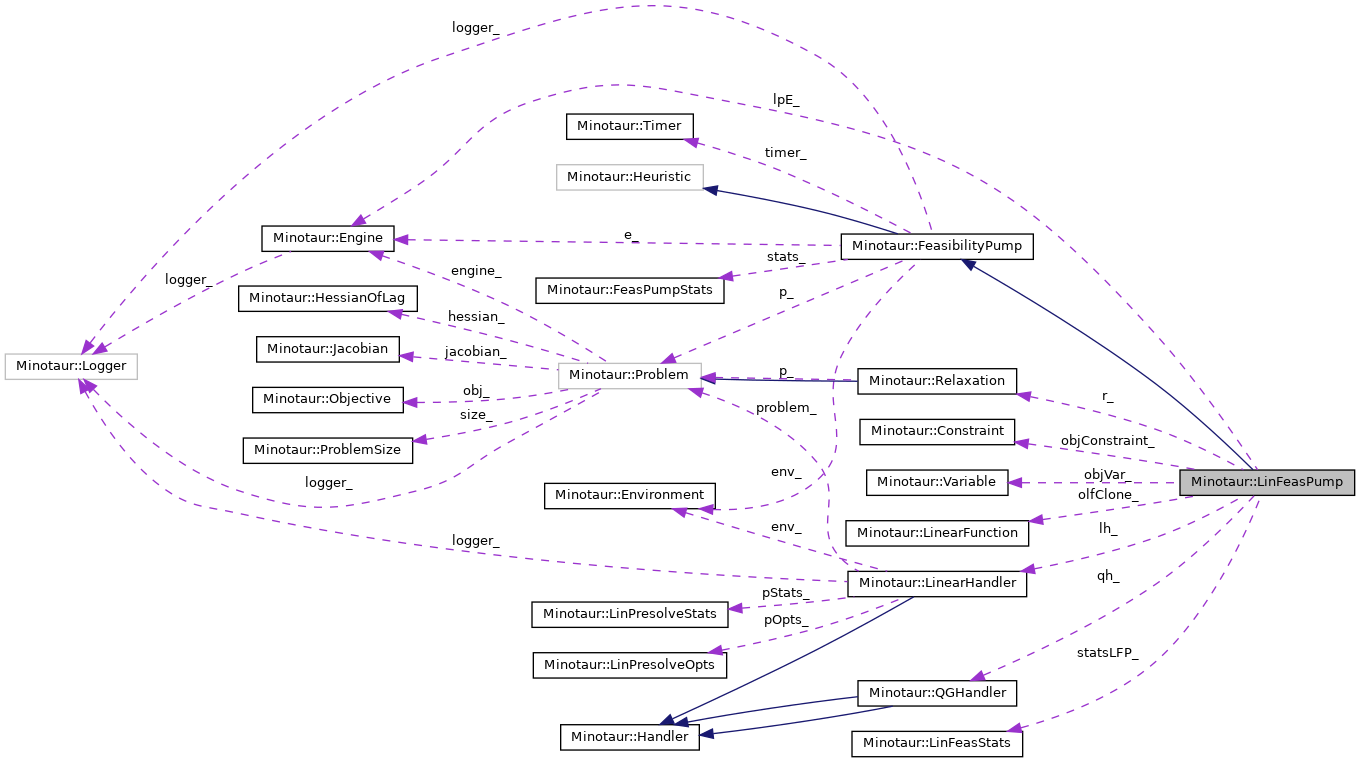
| LinHandlerPtr | lh_ |
| Linear Handler pointer. | |
| EnginePtr | lpE_ |
| LP Engine to be used to solving linear relaxation. | |
| ConstraintPtr | objConstraint_ |
| objective improvement constraint pointer | |
| VariablePtr | objVar_ |
| LinearFunctionPtr | olfClone_ |
| clone of linear objective function | |
| QGHandlerPtr | qh_ |
| QG Handler. | |
| RelaxationPtr | r_ |
| Relaxation Pointer. | |
| LinFeasStats * | statsLFP_ |
| Statistics. | |
| Protected Attributes inherited from Minotaur::FeasibilityPump | |
| VarVector | bins_ |
| Binary/integer variables present in the problem. | |
| EnginePtr | e_ |
| Pointer to the engine to be used to solve the problem. | |
| EnvPtr | env_ |
| Pointer to the environment. | |
| DoubleVector | hashVal_ |
| Vector for hash value of solutions. | |
| double | intTol_ |
| Tolerance for a number to be considered as an integer. | |
| LoggerPtr | logger_ |
| Pointer to the logger. | |
| UInt | nToFlip_ |
| Number of variables to be flipped if cycling is detected. | |
| ProblemPtr | p_ |
| Pointer to the problem being solved. | |
| DoubleVector | random_ |
| A random vector for inner product with the solution. | |
| DoubleVector | roundedSol_ |
| Vector of rounded solution. | |
| FeasPumpStats * | stats_ |
| Statistics for the Feasibility Pump heuristic. | |
| Timer * | timer_ |
| Timer of the heuristic. | |
Static Protected Attributes | |
| static const std::string | me_ = "Linear Feas Pump: " |
| Message name for the heuristic. | |
| Static Protected Attributes inherited from Minotaur::FeasibilityPump | |
| static const std::string | me_ = "Feasibility Pump: " |
| Message name for the heuristic. | |
Detailed Description
Linear Feasibility Pump for MINLPs.
A Linear Feasibility Pump heuristic used to find solutions for Mixed Integer NLPs by solving a linear relaxation of NLP using a LP engine. An NLP is solved after every "n" iterations and solution from NLP solve is used to construct a LP relaxation. This class is derived from the class FeasibilityPump.
Constructor & Destructor Documentation
◆ LinFeasPump()
| LinFeasPump::LinFeasPump | ( | EnvPtr | env, |
| ProblemPtr | p, | ||
| EnginePtr | e1, | ||
| EnginePtr | e2 | ||
| ) |
Default constructor.
- Parameters
-
[in] env Environment pointer [in] p Problem pointer [in] e1 The NLP engine pointer [in[ e2 The LP engine pointer
The constructor initializes the base class using env, p and e1 and uses e2 to initialize the LP engine. Logger of the base is also defined in this function.
Member Function Documentation
◆ constructObj_()
|
protectedvirtual |
Function to construct/update the objective function.
- Parameters
-
[in] prob Pointer to the cloned problem [in] sol Pointer to the solution of relaxation that was previously solved.
This function selects the variable which are fractional and construct the objective function out of such variables. The new objective function replaces the objective of the problem passed
Reimplemented from Minotaur::FeasibilityPump.
◆ getSolGap_()
|
protected |
Calculate the gap between the NLP relaxation solution and integer feasible solution.
- Parameters
-
[in] f_nlp nlp solution value. [in] x const pointer to integer feasible solution.
- Returns
- gap. gap is given by


◆ implementFP_()
|
protectedvirtual |
Fucntion to implement the linear feasibility pump.
- Parameters
-
[in] s_pool Pointer to solution pool [in] x Is not required. Can be NULL.
Reimplemented from Minotaur::FeasibilityPump.
◆ prepareLP_()
|
protected |
A function to prepare the linear relaxation.
- Returns
- True if problem is infeasible else false
This function first initializes the Linear Handler and QG Handler which are then used to construct a linear relaxation from the original problem
◆ separatingCut_()
|
protected |
This function makes a cut by including the objective as constraint.
- Parameters
-
[in] f_nlp NLP solution value solution [in] x const pointer to the primal feasible solution
If a feasible solution is found we add an additional constraint to the problem to force the heuristic to find a better feasible fucntion. The constraint added is a linear relaxation of the objective at the feasible point, i.e. 
◆ shouldFP_()
|
protectedvirtual |
Function to decide whether to use Linear Feasibility Pump.
- Returns
- true if to be implemented else fasle
The linear feasibility pump is not implemented for problems with equality constraints for the form 
Reimplemented from Minotaur::FeasibilityPump.
◆ solve()
|
virtual |
Call to the heuristic.
Reimplemented from Minotaur::FeasibilityPump.
◆ writeStats()
|
virtual |
Write statistics to the logger.
Reimplemented from Minotaur::FeasibilityPump.
Member Data Documentation
◆ objVar_
|
protected |
The objective variable added by linearization of objective. If the objective is linear, it is NULL.
The documentation for this class was generated from the following files:
- /home/amahajan/tmp/minotaur-test/src/base/LinFeasPump.h
- /home/amahajan/tmp/minotaur-test/src/base/LinFeasPump.cpp