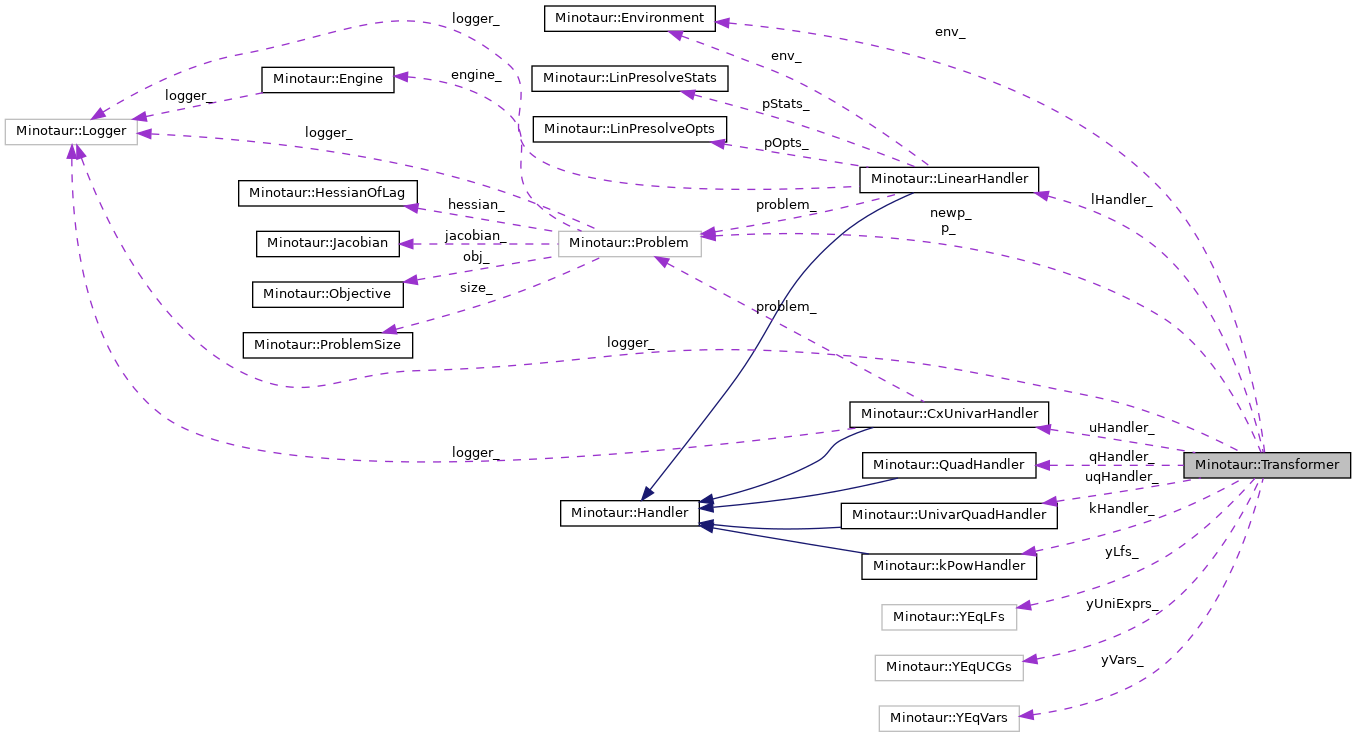
Abstract base class for reformulating a problem so that handlers can be applied to it. More...
#include <Transformer.h>

Public Member Functions | |
| Transformer () | |
| Default Constructor. | |
| Transformer (EnvPtr env, ProblemPtr oldp) | |
| Constructor. | |
| virtual | ~Transformer () |
| Destroy. | |
| virtual std::string | getName () const =0 |
| Get the name of this Transformer. | |
| virtual SolutionPtr | getSolOrig (ConstSolutionPtr sol, int &err)=0 |
| Translate the solution of reformulated problem into that of original problem. | |
| virtual SolutionPtr | getSolTrans (ConstSolutionPtr sol, int &err)=0 |
| Translate the solution of originial problem into that of reformulated problem. | |
| virtual void | reformulate (ProblemPtr &newp, HandlerVector &handlers, int &status)=0 |
| Perform the reformulation, and assign handlers. | |
Protected Member Functions | |
| bool | allConsAssigned_ (ProblemPtr p, HandlerVector &handlers) |
| Check if all constraints in a problem have been assigned to a handler. | |
| void | assignHandler_ (CGraphPtr cg, ConstraintPtr c) |
Assign an appropriate handler to a nonlinear constraint of the form  | |
| void | clearUnusedHandlers_ (HandlerVector &handlers) |
| Delete unused handlers. | |
| void | copyLinear_ (ConstProblemPtr p, ProblemPtr newp) |
| Copy all the linear constraints of the problem into the new problem. | |
| void | copyVars_ (ConstProblemPtr p, ProblemPtr newp) |
| Copy all the linear constraints of the problem into the new problem. | |
| virtual void | makeObjLin_ () |
| void | minObj_ () |
| Convert a maximization objective into minimization. | |
| VariablePtr | newVar_ (VariablePtr iv, double d, ProblemPtr newp) |
Find the auxiliary variable associated with  | |
| VariablePtr | newVar_ (LinearFunctionPtr lf, double d, ProblemPtr newp) |
Find the auxiliary variable associated with  | |
| VariablePtr | newVar_ (CGraphPtr cg, ProblemPtr newp) |
Find the auxiliary variable associated with  | |
Protected Attributes | |
| EnvPtr | env_ |
| The pointer to environment. | |
| LinearHandlerPtr | lHandler_ |
| Handler for linear constraints and variables. | |
| LogHandlerPtr | logHandler_ |
| Handler for Log Constraints. | |
| ExpHandlerPtr | expHandler_ |
| Handler for Exponential Constraints. | |
| PowHandlerPtr | powHandler_ |
| Handler for Power constraints. | |
| RecipHandlerPtr | recipHandler_ |
| handler for y=1/x constraint | |
| LoggerPtr | logger_ |
| Logger. | |
| ProblemPtr | newp_ |
| The transformed problem. | |
| ProblemPtr | p_ |
| The original problem. | |
| kPowHandlerPtr | kHandler_ |
| Handler for y = x^k type constraints. | |
| QuadHandlerPtr | qHandler_ |
| Handler for quadratic terms. | |
| CxUnivarHandlerPtr | uHandler_ |
| Handler for univariate constraints. | |
| UnivarQuadHandlerPtr | uqHandler_ |
| Handler for univariate quadratic constraints. | |
| YEqLFs * | yLfs_ |
Storage for auxiliary variables defined by relations of the form  | |
| YEqUCGs * | yUniExprs_ |
Storage for auxiliary variables defined by relations of the form  | |
| YEqVars * | yVars_ |
Storage for auxiliary variables defined by relations of the form  | |
| const double | zTol_ |
| Tolerance for checking if a value is zero. | |
Detailed Description
Abstract base class for reformulating a problem so that handlers can be applied to it.
A transformer will create a new problem equivalent to a given problem by spliting constraints, adding new variables etc. The end result is a problem whose each constraint can be handled by a specific handler. This class has some abstract virtual methods that must be implemented by a derived class. Other commonly used functions are implemented here.
Member Function Documentation
◆ allConsAssigned_()
|
protected |
Check if all constraints in a problem have been assigned to a handler.
- Parameters
-
[in] p Problem whose constraints need to be checked.
- Returns
- True if all constraints have been assigned. False otherwise.
◆ assignHandler_()
|
protected |
Assign an appropriate handler to a nonlinear constraint of the form
- Parameters
-
[in] cg A nonlinear function which is be replaced by the auxiliary variable. [in] c The nonlinear constraint 
◆ clearUnusedHandlers_()
|
protected |
Delete unused handlers.
- Parameters
-
[in/out] handlers. Contains pointers to each handler. Unused ones are removed from the vector.
◆ copyLinear_()
|
protected |
Copy all the linear constraints of the problem into the new problem.
- Parameters
-
[in] p Input problem [in] newp The transformed problem to which new constraints are added.
◆ copyVars_()
|
protected |
Copy all the linear constraints of the problem into the new problem.
- Parameters
-
[in] p Input problem [in] newp The transformed problem to which new constraints are added.
◆ getName()
|
pure virtual |
Get the name of this Transformer.
Implemented in Minotaur::QuadTransformer, Minotaur::SimpleTransformer, and Minotaur::TransPoly.
◆ getSolOrig()
|
pure virtual |
Translate the solution of reformulated problem into that of original problem.
- Parameters
-
[in] sol Solution of the reformulated problem. [out] err Zero if no error is encountered, nonzero otherwise.
- Returns
- Solution of original problem.
Implemented in Minotaur::QuadTransformer, Minotaur::SimpleTransformer, and Minotaur::TransPoly.
◆ getSolTrans()
|
pure virtual |
Translate the solution of originial problem into that of reformulated problem.
- Parameters
-
[in] sol Solution of the original problem. [out] err Zero if no error is encountered, nonzero otherwise.
- Returns
- Solution of the reformulated problem.
Implemented in Minotaur::QuadTransformer, Minotaur::SimpleTransformer, and Minotaur::TransPoly.
◆ makeObjLin_()
|
protectedvirtual |
Converts the new Problem newp_ into one with a linear objective by adding a new variable if necessary.
◆ newVar_() [1/3]
|
protected |
Find the auxiliary variable associated with
- Parameters
-
[in] The nonlinear function. [in] newp The transformed problem to which the new constraint should be added, in case this constraint is not found.
- Returns
- The variable


◆ newVar_() [2/3]
|
protected |
Find the auxiliary variable associated with
- Parameters
-
[in/out] lf The linear function 
[in] d The value 
[in] newp The transformed problem to which the new constraint should be added, in case this constraint is not found.


- Returns
- The variable
◆ newVar_() [3/3]
|
protected |
Find the auxiliary variable associated with
- Parameters
-
[in] iv The variable 
[in] d The value [in] newp The transformed problem to which the new constraint should be added, in case this constraint is not found.

- Returns
- The variable
◆ reformulate()
|
pure virtual |
Perform the reformulation, and assign handlers.
- Parameters
-
[out] newp The new, reformulated problem. [out] handlers A vector of handlers used to reformulate the problem. [out] status Zero if reformulated successfully. Nonzero otherwise.
Implemented in Minotaur::QuadTransformer, Minotaur::SimpleTransformer, and Minotaur::TransPoly.
The documentation for this class was generated from the following files:
- /home/amahajan/tmp/minotaur-test/src/base/Transformer.h
- /home/amahajan/tmp/minotaur-test/src/base/Transformer.cpp